|
Документация Blender'а Том I - Руководство пользователя |
||
|---|---|---|
|
Анимация персонажей |
||
Относится к Blender v2.31
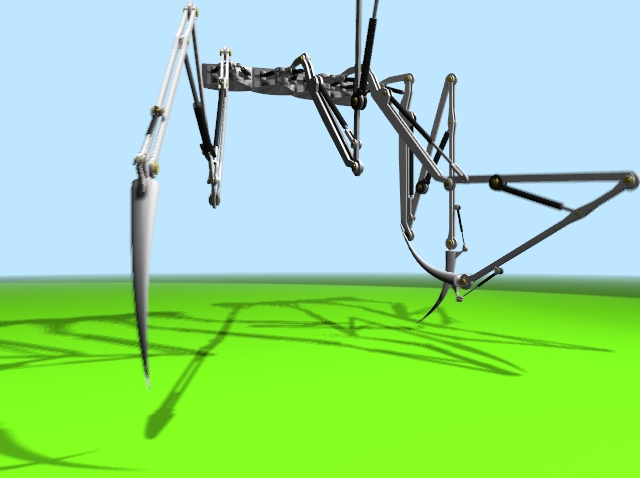
Арматура также хорошо подходит для создания различных механизмов, например роботов, трансформеров и пр. (Рис. 55).
Рис. 55. Четыре ноги механического паука.
Вначале создадим меш для рук-клешней. Поскольку мы имеем дело не с органикой, а с механизмом, меш будет не цельным, а состоящим из нескольких «твердых» частей, «прикрученных» одна к другой.
Хотя на Рис. 55 показаны четыре клешни, каждая из которых имеет пять секций, понять все тонкости будет проще на простой модели шарнирной конечности.
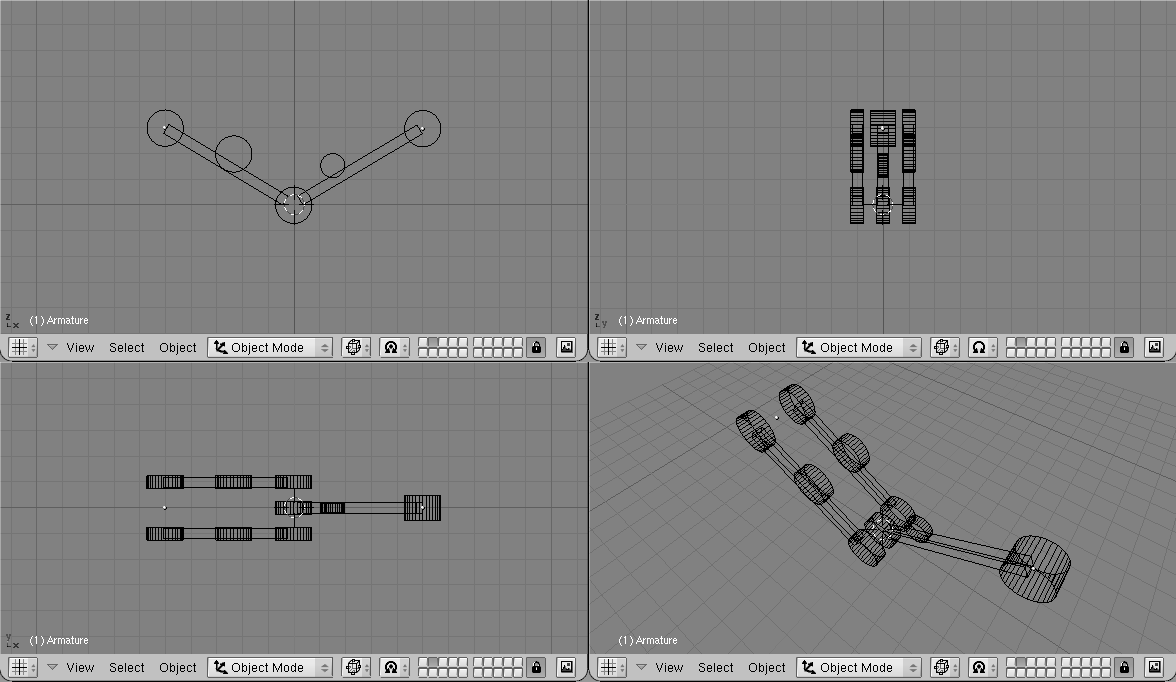
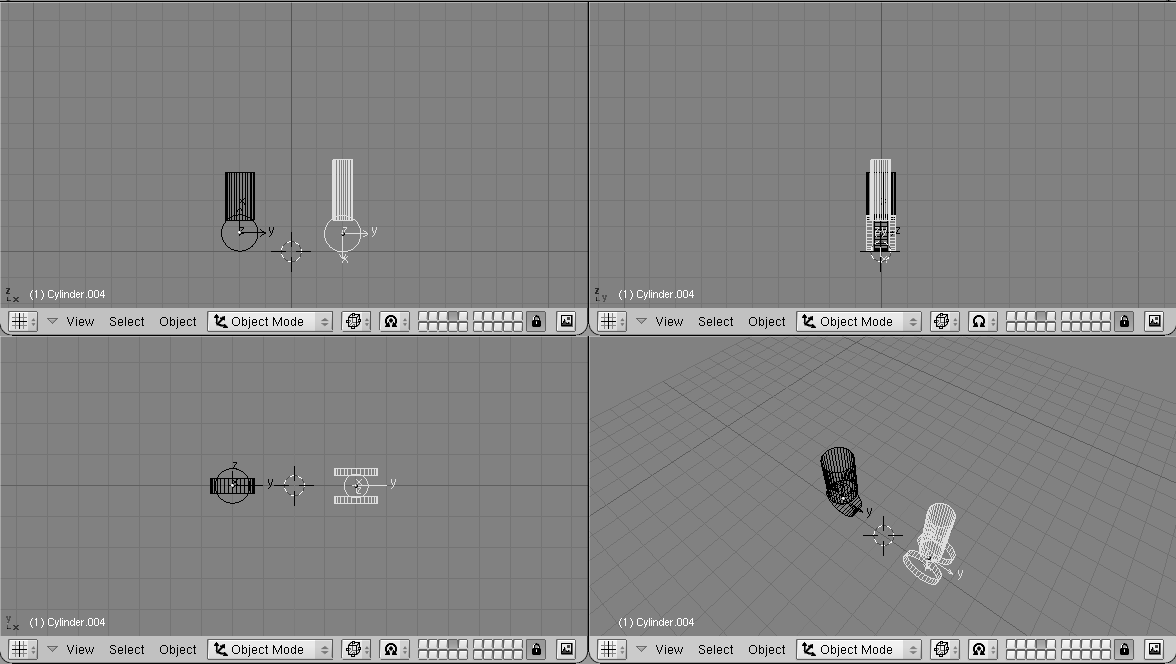
Предлагается следующее: создадим «руку» из двух одинаковых секций и «предплечье», из одной секции. Обозначим цилиндрами «плечо» (слева), «локоть» (в центре) и «запястье» (справа) – см.Рис. 56.
Рис. 56. Модель «руки».
Остальные цилиндры в середине «руки» и «предплечья» обозначают места, к которым будут закреплены поршни.
Работать будет удобнее, если расположить оси взаимного вращения («плечо», «локоть», т.п.) точно на сетке. Вместо этого можно также пользоваться меню выравнивания.
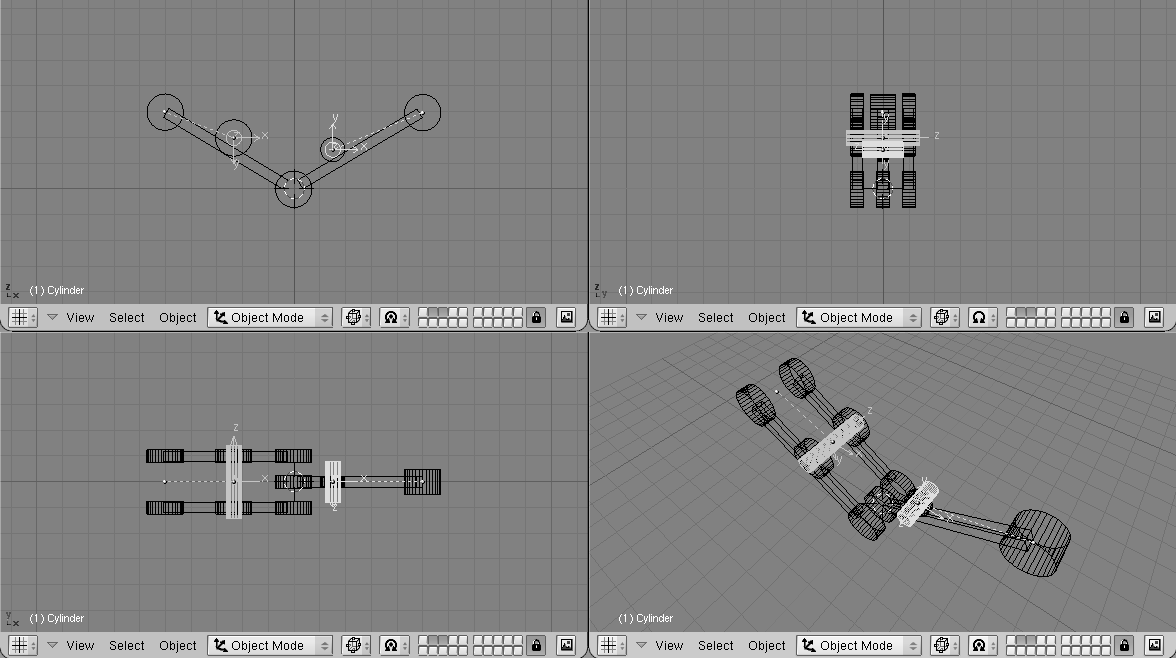
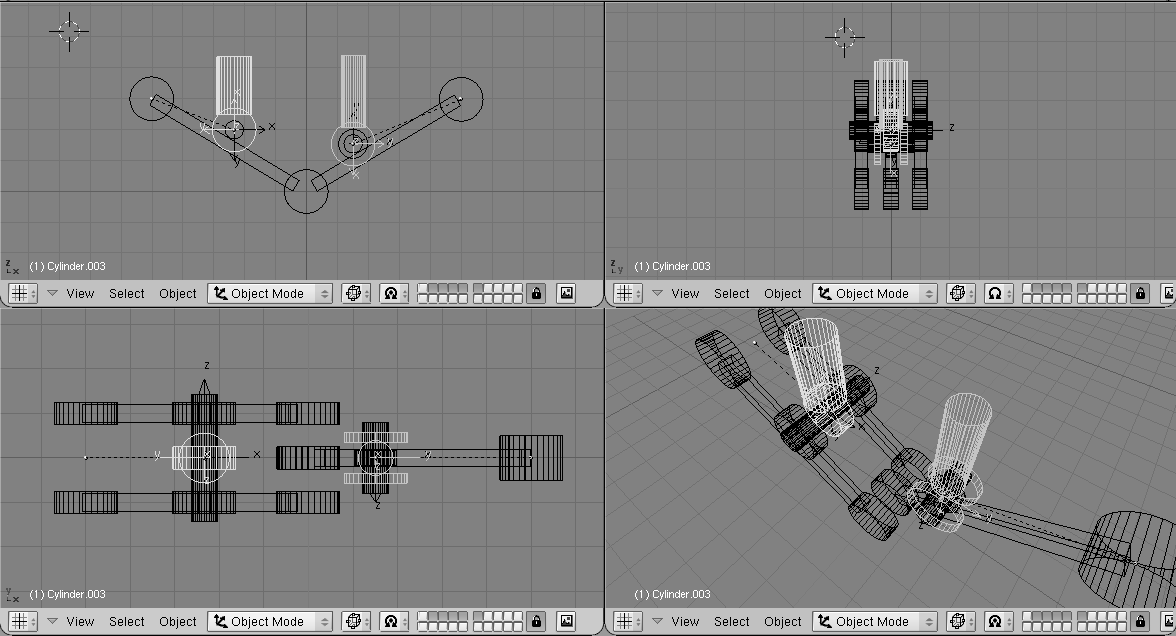
Теперь нужно связать центральные точки с механическими осями. Теоретически, их должно быть по одной в каждом шарнире и еще две, для каждого из гидравлических цилиндров. Для простоты оставим только две оси для поршней, сделав их в виде простых цилиндров (Рис. 57).
Рис. 57. Модель руки с осями.
Помните две вещи:
Очень важно, чтобы центр меша оси был точно посередине и совпадал с осью вращения поршня.
Каждая из осей должна стать потомком соответствующего меша руки.
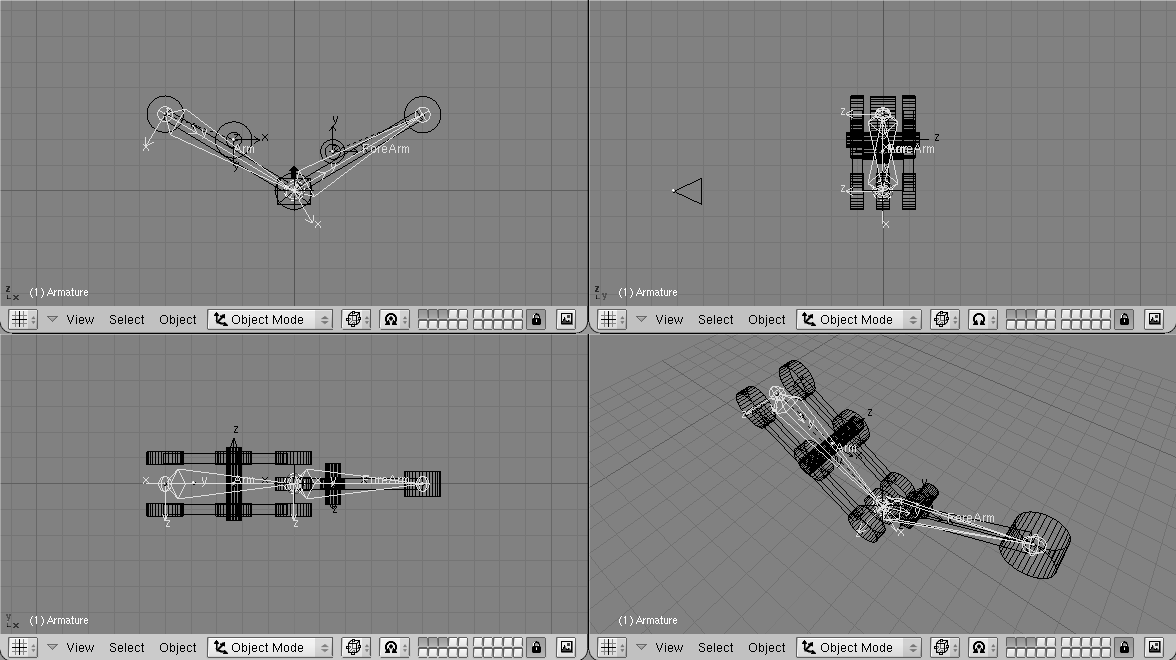
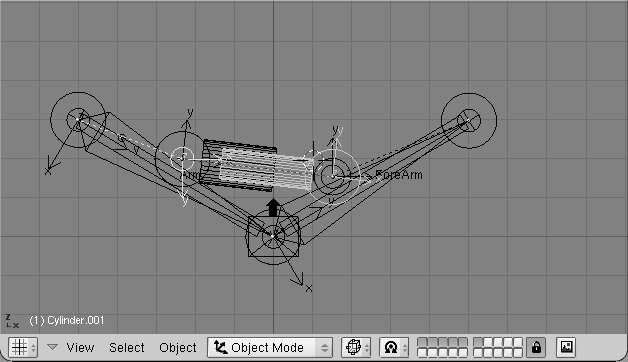
Настроим арматуру. Хватит всего двух «косточек» (Рис. 58).
Рис. 58. Модель руки с арматурой.
Для точной анимации движения, шарниры следует точно совместить с центральными осями (для этого чуть раньше и советовалось поместить оси точно по сетке, чтобы воспользоваться автоматическим выравниваением по ней).
Дадим «косточкам» правильные имена, например «Arm» и «Forearm» (от англ. «рука» и «предплечье» - прим. перев.). Сделаем арматуру предком меша «руки», выбрав при этом в меню опцию «Bone» и кость руки «Arm». То же самое сделаем с костью и мешем «предплечья».
|
|
Предок - «кость» |
|---|---|
|
|
Назначение предком меша «кости» арматуры заставляет его перемещаться вместе с «костью» без деформации. Именно так двигается робот с негнущимися стальными конечностями. |
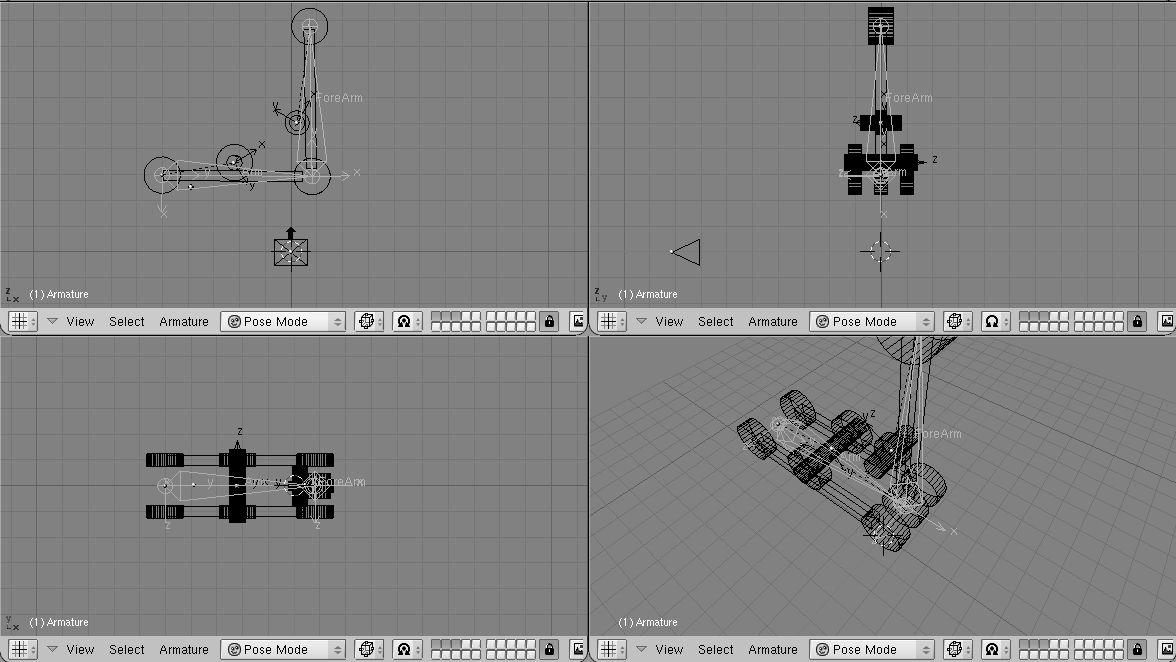
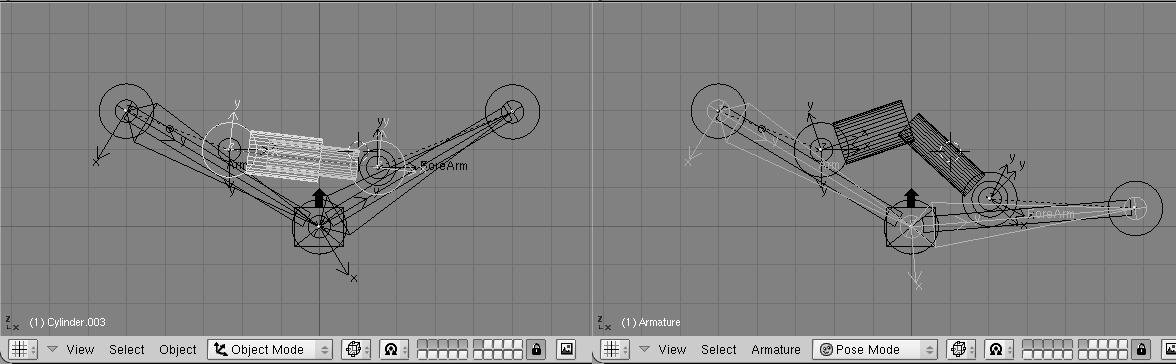
Рис. 59. Модель руки в режиме позы.
Переключившись в режим позы, можно двигать нашей «рукой», поворачивая «кости» (Рис. 59). Также можно добавить привод ИК, способом, описанным в предыдущем параграфе.
Рис. 60. Гидравлический цилиндр.
Сделаем поршень с двумя цилиндрами, один тоньше другого, имеющими что-то вроде головок для их связи со своими осями (Рис. 60).
Необходимо, чтобы центры обоих мешей совпадали с центрами их осей.
Разместим обе части поршня в правильном положении и назначим каждую из них потомками мешей соответствующих осей. (Рис. 61).
Рис. 61. Гидравлический цилиндр на «руке»
Теперь нужно повернуть оба цилиндра так, чтобы получился правильный неподвижный поршень. (Рис. 62, слева).
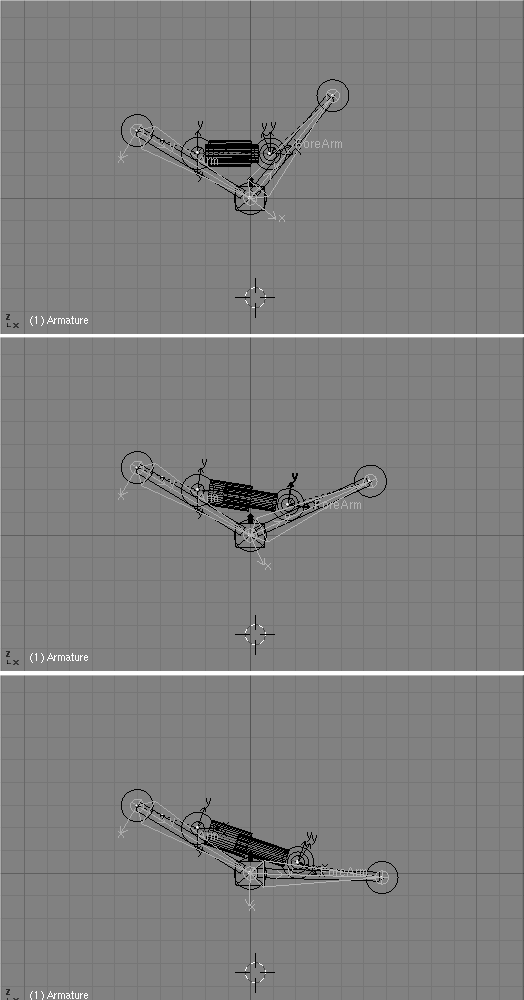
Рис. 62. Гидравлический цилиндр в режиме позирования.
Но если теперь переключиться в режим позирования и сдвинуть любую кость, то наш поршень «сложится» (Рис. 62, справа).
Чтобы поршень заработал правильно, нужно заставить каждую его половинку отслеживать меш оси противоположной половинки (но не самой половинки – это закольцует привязку). Поэтому так важно положение центров всех мешей (Рис. 63).
Рис. 63. Гидравлический цилиндр со взаимным отслеживанием поршней
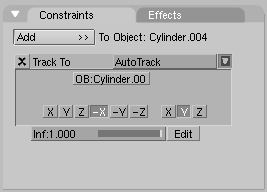
Выделим половинку поршня, затем выделим меш оси противоположной половинки, и в панели контекстных кнопок (F7), на вкладке «Constraints», добавим привязку вида «Track To». Следует также включить нужные кнопки X, Y... внизу вкладки (Рис. 64).
Рис. 64 Настройка отслеживания.
|
|
Если вы предпочитаете старый способ отслеживания (Old Track), для лучшего результата следует включить опцию «PowerTrack» в панели «Anim Setting». |
Теперь, в режиме позирования, цилиндр будет сжиматься и разжиматься, словно реальный (Рис. 65).
Рис. 65. Режим позирования руки с гидравликой
Так как гидравлические поршни приводятся в действие сжатым маслом, для получения точной модели нам нужно добавить к ней шланги. Как же соединить деформируемой трубкой руку и цилиндр, которые взаимно вращаются? Здесь необходим привод ИК!
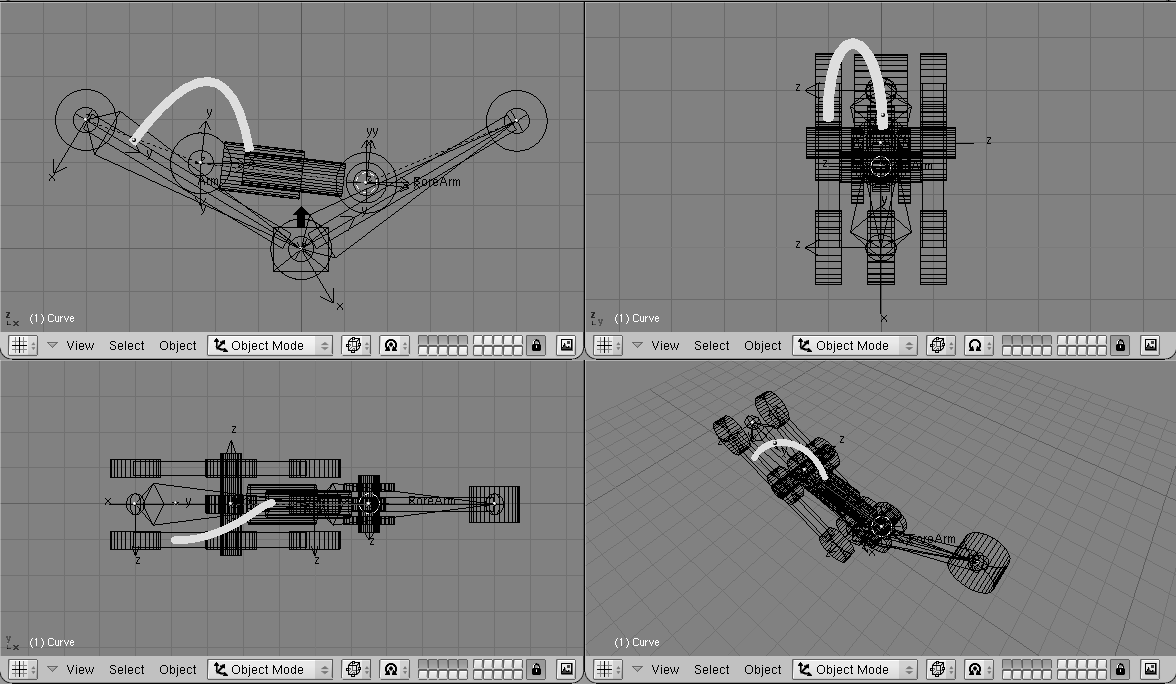
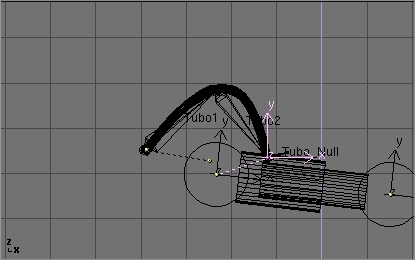
Рис. 66. Добавляем гибкую трубку
Вначале создадим меш в форме трубки, которую мы хотим (Рис. 66).
Лично я предпочитаю рисовать трубку в ее согнутом положении при помощи кривой с заданным сечением. Для этого добавляем кривую и окружносте Безье, и указываем окружность как «BevOb» для кривой. Для того, чтобы полученный объект мог деформироваться арматурой, преобразуем его в меш (ALT-C).
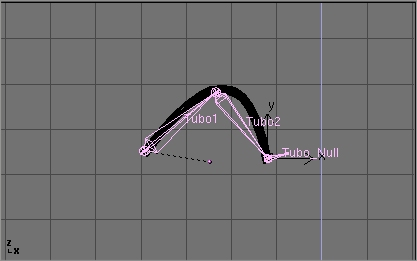
Рис. 67. Добавляем к трубке арматуру.
Затем добавим арматуру. Достаточно пары костей. Арматура должна быть направлена от фиксированного конца трубки к её подвижному краю. Добавим третью кость для привода ИК (Рис. 67).
Нужно сделать арматуру потомком того объекта, к которому «приделана» трубка. В нашем случае это – рука робота. Также добавим «пустой» объект к подвижному концу трубки (Рис. 68).
Рис. 68. «Пустой» объект для инверсной кинематики.
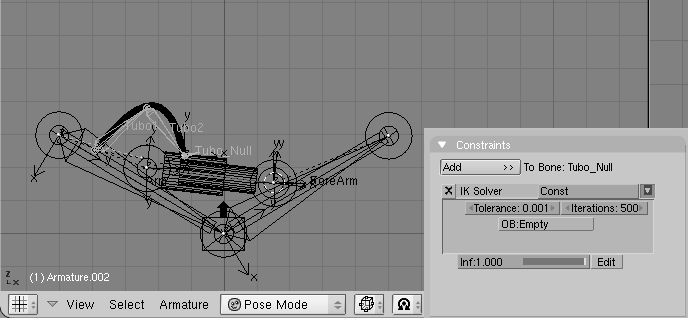
Рис. 69. Привязка инверсной кинематики
Сделаем «пустой» объект потомком подвижной части модели. В нашем случае это внешняя часть поршня, к которой закреплен подвижный конец трубки. В режиме позирования откроем панель контекстных кнопок и вкладку привязок «Constraints». Выделим самую последнюю кость, ту что начинается из конца трубки, и добавим к ней привязку. Укажем тип привязки: «IK solver», а в качестве цели укажем созданный «пустой» объект (Рис. 69). Можно также подобрать параметры «Tolerance:» и «Iterations:».
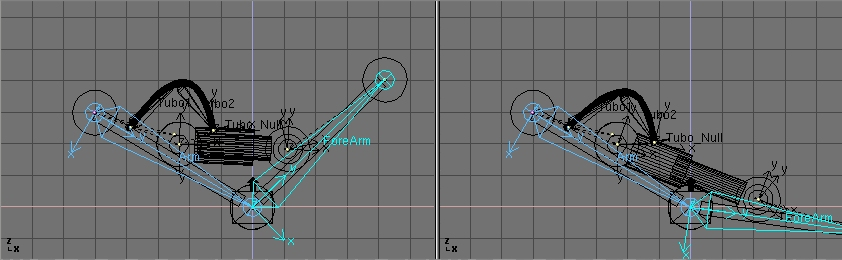
И, наконец, сделаем трубку потомком арматуры, указав опцию «Armature». Создадим необходимые группы вершин. Теперь, в режиме позирования, при перемещении половинок цилиндра будет перемещаться и «пустой» объект, заставляя работать инверсную кинематику арматуры, и деформируя трубку (Рис. 69).
Рис. 70. Полностью оснащенная рука робота в режиме позирования.
|
|
В качестве цели для привода ИК можно использовать не только «пустой» объект, но и кость арматуры, однако в этом случае её нельзя будет сделать потомком движуегося объекта. Хотя и в этом случае можно будет использовать привязку вида «Copy Location», но это не так просто, поскольку конец арматуры будет помещен в центре движущегося объекта, который находится не в том месте, которое нам нужно. |
|
Арматура для конечностей |
Нелинейная анимация ходьбы |